Tính năng lớn nhất của “ClassNK-PEERLESS” là tạo mô hình 3D từ các đám mây điểm một cách nhanh chóng và dễ dàng. Vì đây là phần mềm chuyên dụng để lập mô hình nên nó đã được đánh giá cao nhờ khả năng dễ dàng thực hiện các tác vụ lập mô hình mà trước đây tốn nhiều thời gian và công sức.
Mặt khác, đôi khi chúng tôi nhận được câu hỏi từ khách hàng, chẳng hạn như “Nhưng việc lập mô hình có cần thiết không? Chỉ sử dụng đám mây điểm thôi chưa đủ sao?”
Thật vậy, nếu một đám mây điểm có thể được sử dụng ngay sau khi lấy nó từ máy quét laser 3D trong các quy trình tiếp theo (thiết kế cải tạo, mô phỏng, v.v.) thì việc lập mô hình là không cần thiết. Thời gian mô hình hóa và chi phí lao động sẽ bị lãng phí. Vậy tại sao lại có nhu cầu sử dụng phần mềm chuyên về mô hình hóa và tại sao lại được nhiều người sử dụng đến vậy?
Trong bài viết này, chúng tôi sẽ giới thiệu “lợi ích của việc lập mô hình đám mây điểm” bằng cách chia chúng thành nhiều tình huống và so sánh các trường hợp chỉ sử dụng đám mây điểm và các trường hợp cũng có thể sử dụng mô hình 3D.
Mục lục
[Theo tình huống] Lợi ích của việc lập mô hình đám mây điểm
- Chia sẻ dữ liệu
- Đo đạc
- Xác nhận nhiễu
- Sử dụng các hệ thống 3D hiện có
- Báo cáo cho khách hàng
1. Chia sẻ dữ liệu
Sau khi thu thập dữ liệu đám mây điểm bằng máy quét laser 3D, điểm nghẽn khi chia sẻ dữ liệu đám mây điểm trong công ty của bạn hoặc với khách hàng là dung lượng lớn của dữ liệu đám mây điểm.
Ở đây, tôi sẽ đưa ra một số ví dụ so sánh dung lượng của đám mây điểm và dung lượng của riêng mô hình 3D.
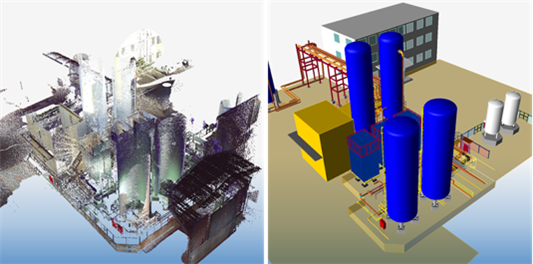
Thiết bị nhà máy
Dữ liệu đám mây điểm
2,95GB (FARO fls)
↓↓
Dữ liệu mô hình 3D (Tỷ lệ kích thước của dữ liệu mô hình 3D so với dữ liệu đám mây điểm nằm trong ngoặc đơn)
Tệp gốc ClassNK-PEERLESS: 18,3 MB ( 0,6% )
IFC: 54,6 MB ( 1,8% )
IGES : 67,4 MB ( 2,2% )
BƯỚC: 29,4 MB ( 1,0% )
DXF: 152 MB ( 5,0% )
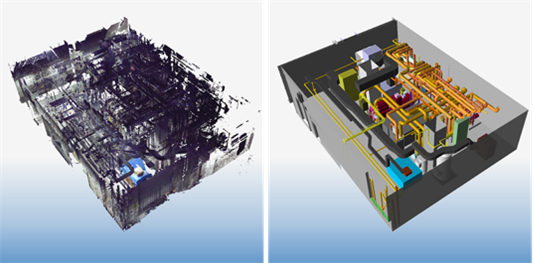
Tiện ích trong tòa nhà
Dữ liệu đám mây điểm
3,76GB (FARO fls)
↓↓
Dữ liệu mô hình 3D (Tỷ lệ kích thước của dữ liệu mô hình 3D so với dữ liệu đám mây điểm nằm trong ngoặc đơn)
Tệp gốc ClassNK-PEERLESS 9,58 MB (0,2% )
IFC: 33,0 MB ( 0,9% )
IGES: 29,6MB ( 0,8% )
BƯỚC: 13,6 MB ( 0,4% )
DXF: 97,1 MB ( 2,5% )
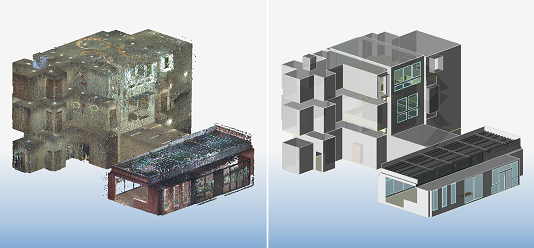
Toàn bộ tòa nhà
Dữ liệu đám mây điểm
3,37GB (e57)
↓↓
Dữ liệu mô hình 3D (Tỷ lệ kích thước của dữ liệu mô hình 3D so với dữ liệu đám mây điểm nằm trong ngoặc đơn)
Tệp gốc ClassNK-PEERLESS 1,15 MB ( 0,03% )
IFC: 1,45 MB ( 0,04% )
IGES: 3,29 MB ( 0,1% )
BƯỚC: 2,19 MB ( 0,06% )
DXF: 3,73 MB ( 0,11% )
Bằng cách này, nếu tạo mô hình 3D, bạn có thể giảm dung lượng khá hiệu quả.
2. Đo đạc
Một trong những lợi ích của phép đo đám mây điểm là sau khi thực hiện phép đo, có thể hiểu được tình hình tại địa điểm mà không cần phải đến địa điểm đó lần nữa. Nói cách khác, việc đo kích thước tại chỗ có thể được thực hiện bất cứ lúc nào từ văn phòng.
Đối với phép đo này, chúng tôi khuyên bạn nên lập mô hình đám mây điểm.
Hãy nhìn vào xác minh thực tế để dễ hiểu hơn.
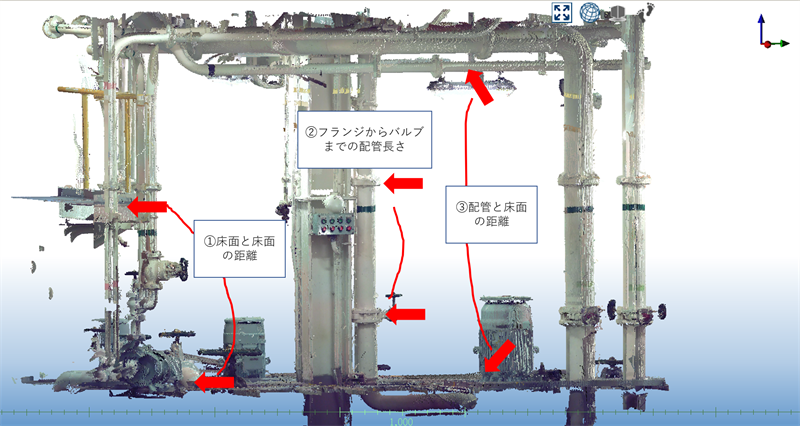
Chúng tôi đã cung cấp dữ liệu và hướng dẫn sau đây cho ba người và yêu cầu họ đo kích thước.
(Lần này, chúng tôi đang sử dụng chức năng đo lường của ClassNK-PEERLESS để đo lường. Chúng tôi không đưa ra hướng dẫn về việc sử dụng chức năng nào.)
Kết quả là như dưới đây.
<Dữ liệu đám mây điểm> Đơn vị: mm
| ①Kết quả đo lường | ②Kết quả đo lường | ③Kết quả đo lường | |
| Ông A | 1474 | 977 | 2504 |
| Ông B | 1484 | 1016 | 2738 |
| Ông C. | 1477 | 1001 | 2507 |
<Mẫu 3D> Đơn vị: mm
| ①Kết quả đo lường | ②Kết quả đo lường | ③Kết quả đo lường | |
| Ông A | 1476 | 1009 | 2507 |
| Ông B | 1476 | 1009 | 2507 |
| Ông C. | 1476 | 1009 | 2507 |
Như bạn có thể thấy từ kết quả, khi đo dữ liệu đám mây điểm, kết quả sẽ khác nhau tùy thuộc vào người thực hiện phép đo. Sai số lớn nhất là 234mm. Mặt khác, tất cả các phép đo trên mô hình 3D đều cho kết quả như nhau.
Tại sao kết quả lại khác nhau nhiều khi đo khoảng cách bằng đám mây điểm?
Đây là một trường hợp cực đoan vì cuối cùng bạn có thể đo được thứ gì đó giống như hình ảnh bên dưới.
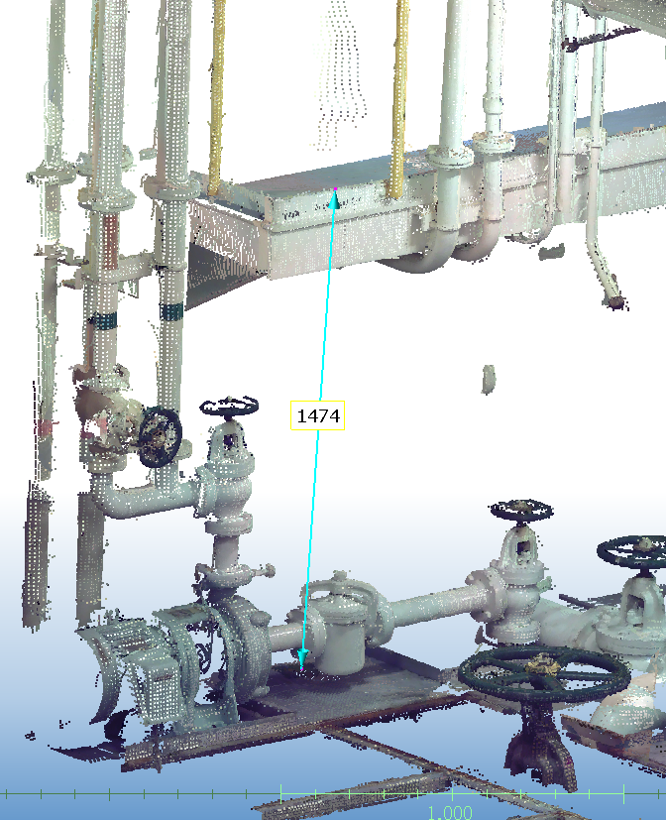
Trong hướng dẫn ①, khoảng cách giữa bề mặt sàn trên và bề mặt sàn dưới được đo trên đám mây điểm.
Đây không phải là thước đo theo chiều dọc nên nó không phải là khoảng cách ngắn nhất giữa các tầng.
ClassNK-PEERLESS có chức năng đo khoảng cách trục giữa các điểm đã chọn nên sử dụng chức năng đó có thể đo theo chiều dọc, tuy nhiên do các điểm được chọn khác nhau tùy theo từng người nên sẽ có sự khác biệt Masu.
Mặt khác, khi đo mô hình 3D, có thể chỉ định các phần tử, giúp đo được khoảng cách dự định ban đầu. Kết quả là, có thể thu được kết quả tương tự cho dù ai đo và đo khi nào, vì vậy nó có thể được sử dụng làm dữ liệu chính.
3. Xác nhận nhiễu
Mục đích của việc thu thập dữ liệu hiện tại dưới dạng đám mây điểm thường là dành cho công việc cải tạo. Chúng tôi hiểu rõ tình trạng của cơ sở hiện có, thiết kế phần mở rộng, xác nhận các tuyến đường xuất/nhập thiết bị và lên kế hoạch di dời. Trong trường hợp này, khu vực được thiết kế mới không được can thiệp vào thiết bị hiện có.
Giai đoạn kiểm tra nhiễu này cũng được hưởng lợi từ việc lập mô hình.
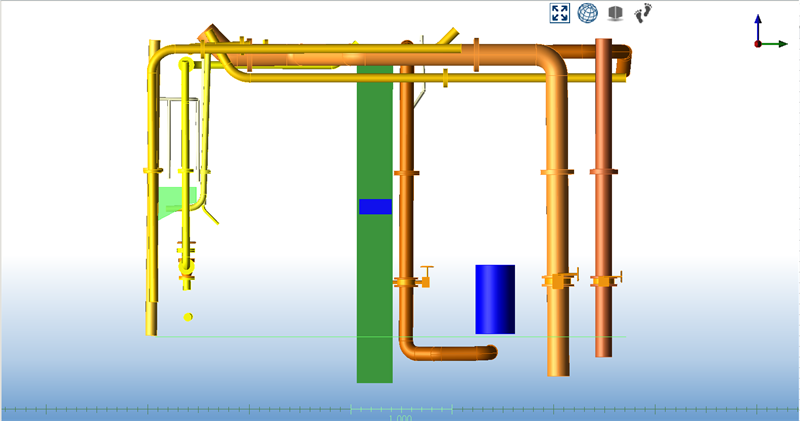
Các hình ảnh sau đây hiển thị cùng một khu vực chỉ được xem bằng đám mây điểm và với mô hình được tạo từ đám mây điểm.
Hướng nhìn cũng vậy.

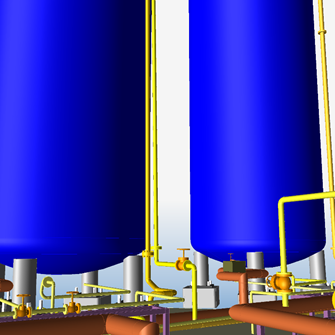
Như bạn có thể thấy trong trường hợp chỉ có đám mây điểm, bể chứa ở bên trái (hình trụ) hầu như không thể nhận ra được. Một số đường ống cũng rất khó nhìn thấy. Điều này thường xảy ra với các phép đo đám mây điểm. Nếu phần bóng mờ bị thiếu hoặc có một đường ống trên trần nhà thì chỉ có thể nhìn thấy nửa dưới của đám mây điểm nếu chỉ thực hiện quét từ bên dưới.
Nếu bạn thiết kế hoặc lên kế hoạch cho các tuyến giao hàng mà không tính đến phần còn thiếu này thì thực tế sẽ xảy ra hiện tượng nhiễu.
Vì điều này có thể được nhìn thấy bằng mắt thường nên những sai sót như vậy hiếm khi xảy ra và bạn có thể cho rằng câu chuyện của tôi quá cực đoan. Nhưng điều gì sẽ xảy ra nếu bạn muốn xử lý một lượng lớn dữ liệu đám mây điểm, thay vì chỉ một phần của dữ liệu đó? Khả năng mắc sai lầm là rất cao và bạn sẽ tốn rất nhiều thời gian và sức lực.
Từ những điều trên, chúng tôi khuyên bạn nên sử dụng mô hình này trong công việc sửa chữa càng nhiều càng tốt.
Sau khi mô hình được tạo, nó có thể được kiểm tra tự động bằng chức năng kiểm tra nhiễu của phần mềm thông thường.
Tất nhiên, ClassNK-PEERLESS còn có chức năng cho phép bạn kiểm tra nhiễu của cả đám mây điểm và mô hình cùng một lúc.
Không khó để tạo một mô hình từ đám mây điểm còn thiếu các phần.
ClassNK-PEERLESS khiến việc này trở nên dễ dàng.
Ví dụ, trong trường hợp đường ống, đường kính được ước tính tự động từ trạng thái của đám mây điểm và được tạo bằng cách áp dụng đường kính đó vào các tiêu chuẩn.
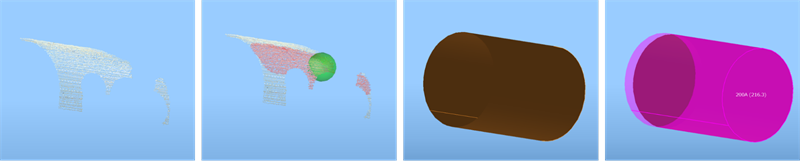
Các hình dạng khác cũng có thể được mô hình hóa theo ý định của người dùng, do đó có thể dễ dàng điền vào những phần còn thiếu.
4. Sử dụng hệ thống 3D hiện có
Khi bắt đầu một dự án sử dụng dữ liệu đám mây điểm nội bộ, có thể rất khó để nắm vững các chức năng và hoạt động của phần mềm mới. Nếu bạn đã quen thuộc với phần mềm thiết kế 3D, có thể bạn sẽ muốn làm việc với nó nhiều nhất có thể.
Trong trường hợp như vậy, liệu phần mềm thiết kế của bạn có thể đọc được lượng lớn dữ liệu đám mây điểm giống như dữ liệu được giới thiệu trong phần “Chia sẻ dữ liệu” không? Ngay cả khi nó có thể được tải, liệu nó có thể vận hành nó mà không bị căng thẳng không?
Đây là nơi mô hình hóa phát huy tác dụng.
Sau khi chuyển dữ liệu được mô hình hóa sang phần mềm thiết kế của mình, bạn có thể làm việc trong môi trường quen thuộc.
Hoạt động lập mô hình của ClassNK-PEERLESS về cơ bản là lặp lại việc vẽ một đám mây điểm bằng con trỏ chuột → nhận dạng tự động → tạo, do đó, ngay cả những người không phải là nhà thiết kế và người mới bắt đầu cũng có thể dễ dàng lập mô hình. ( *Video tham khảo )
Dưới đây là các ví dụ điển hình về phần mềm thiết kế được người dùng ClassNK-PEERLESS sử dụng.
Tất nhiên, có những phần mềm khác có thể đọc đầu ra mô hình 3D từ ClassNK-PEERLESS.
Nếu bạn có bất kỳ mối quan tâm nào, xin vui lòng liên hệ với chúng tôi.
- Autodesk
- Plant 3D
- Revit
- 3ds Max
- AutoCAD
- Navisworks
- Intergraph Corporation
- Smart 3D
- EYECAD
- AVEVA
- E3D Design
- PDMS
- NYK Systems
- Rebro
- Daitec
- CADWe’ll Tfas
- Dassault Systemes
- SolidWorks
Đặc biệt, bạn có thể xuất tệp pcf sang Plant3D và dữ liệu từ EYEPoints sang EYECAD. Trong cả hai trường hợp, thông tin đường ống cũng có thể được truyền dưới dạng dữ liệu.
Bằng cách lập mô hình theo cách này, dữ liệu sẽ trở nên dễ xử lý hơn nhiều.
Dễ dàng và nhanh chóng tạo các mô hình và nhanh chóng chuyển chúng sang môi trường quen thuộc!
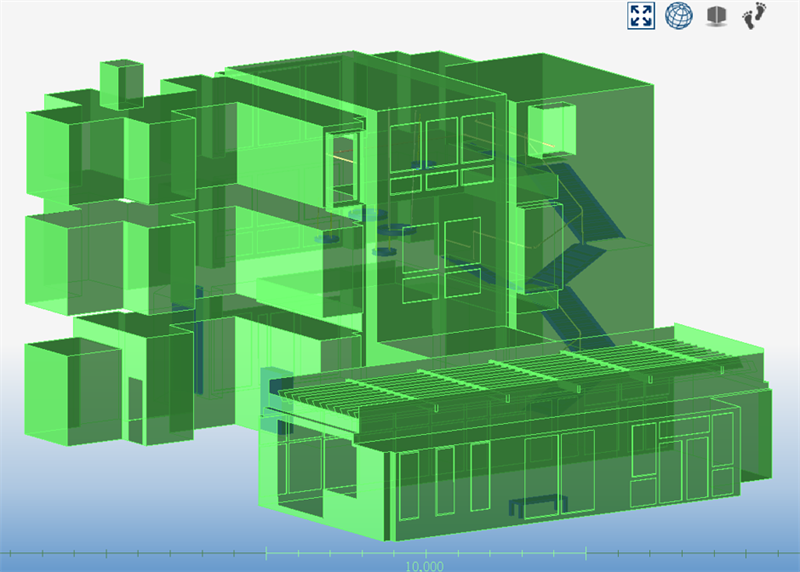
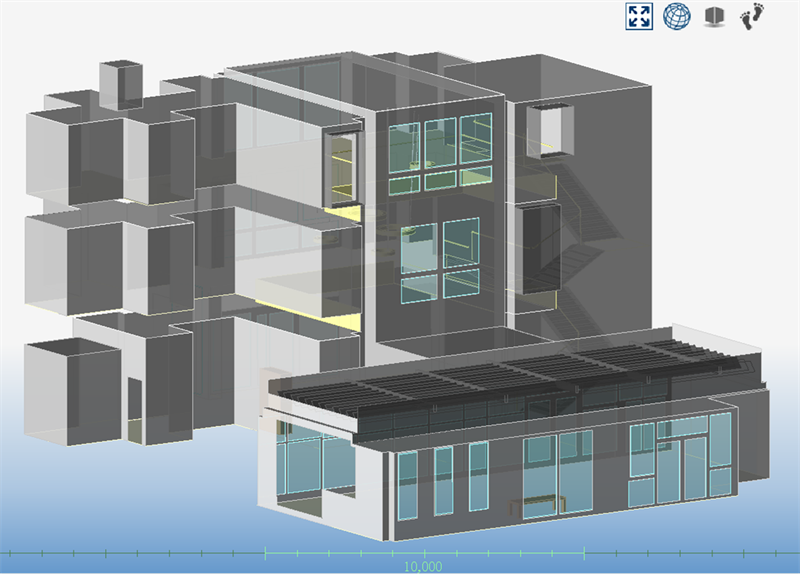
5. Báo cáo cho khách hàng
Mô hình hóa cũng có hiệu quả khi thực hiện công việc đo lường, mô phỏng và thiết kế bằng cách sử dụng dữ liệu được quét và báo cáo kết quả.
Nó đơn giản nhưng nó cải thiện khả năng hiển thị.
Xin vui lòng xem hình ảnh so sánh.
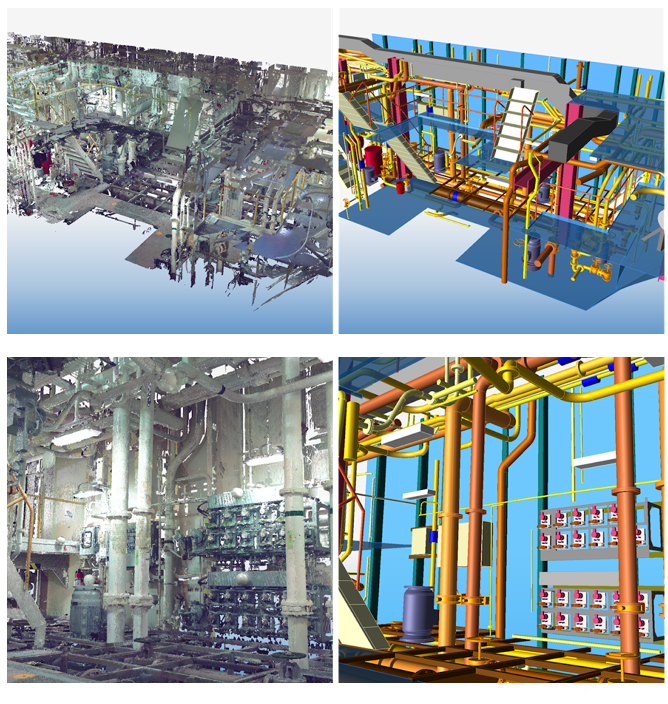
Sự khác biệt đặc biệt đáng chú ý khi xem trong VR.
Như bạn có thể thấy khi so sánh, bạn có thể thấy rõ các bộ phận có đường ống phức tạp và các bộ phận không thể nhận ra nếu nhìn nhanh.
Ngoài ra, bằng cách thay đổi màu sắc, bạn có thể tạo ra biểu cảm chân thực hơn.
bản tóm tắt
Nó thế nào?
Bạn có thấy rằng việc lập mô hình dữ liệu đám mây điểm có lợi ích trong nhiều tình huống khác nhau, bao gồm chia sẻ dữ liệu, đo lường, xác nhận nhiễu, sử dụng hệ thống 3D hiện có và báo cáo cho khách hàng không?
Nếu bạn biết rằng mô hình hóa là tốt nhưng không thích chi phí liên quan, vui lòng thử mô hình hóa của ClassNK-PEERLESS.
Nếu bạn nhìn vào hoạt động trực quan và dễ dàng cũng như khả năng lập mô hình theo tiêu chuẩn mà không cần bất kỳ kiến thức thiết kế nào, bạn có thể dễ dàng tưởng tượng cách có thể đạt được mô hình hóa với thời gian và chi phí lao động giảm.
Chúng tôi luôn sẵn sàng đón nhận các yêu cầu giới thiệu và demo sản phẩm, vì vậy vui lòng liên hệ với chúng tôi.
Nguồn: Sưu tầm